一,测试雷达好坏
下载安装livox viewer 2:https://www.livoxtech.com/cn/downloads
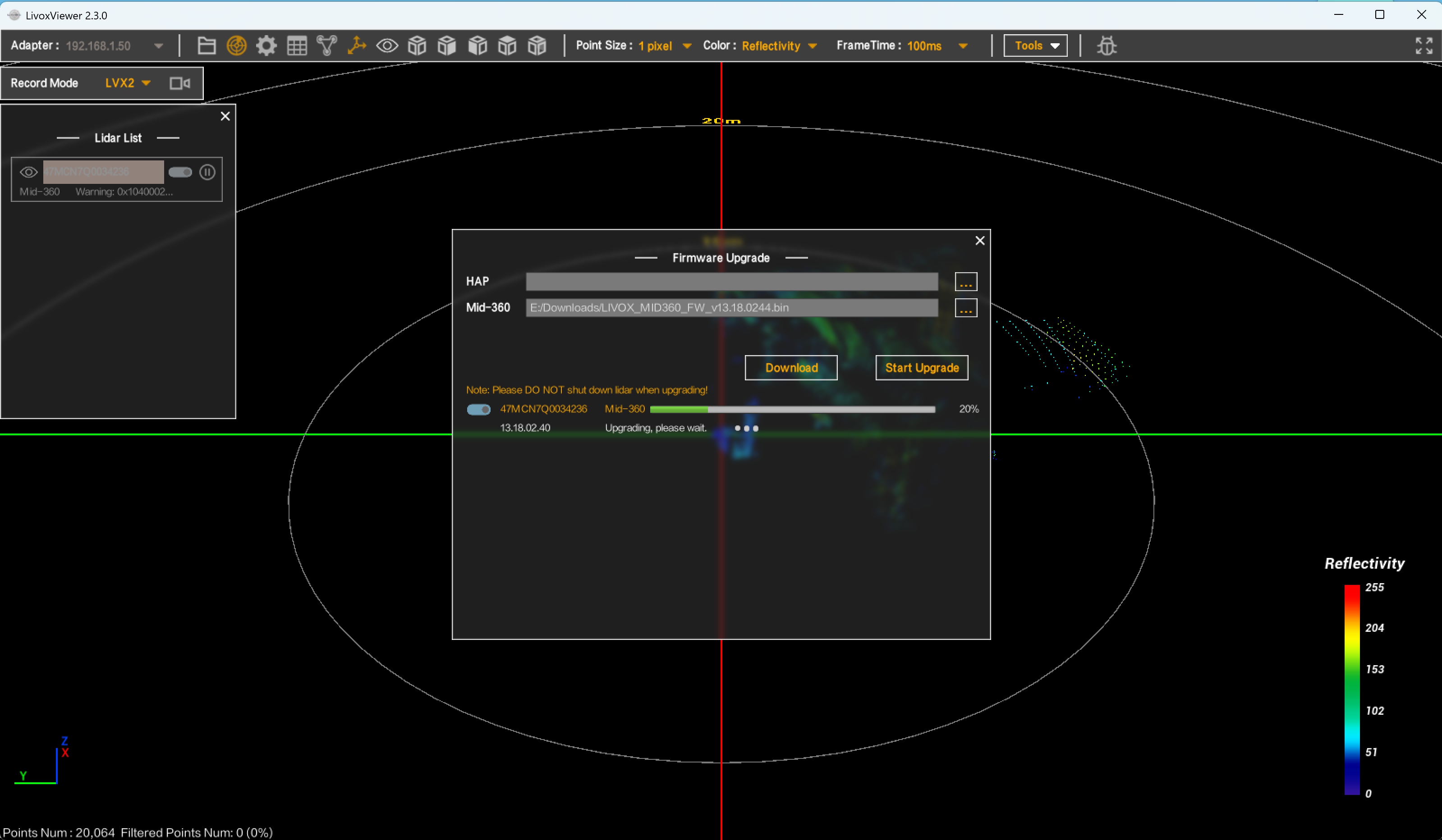
二,更新固件
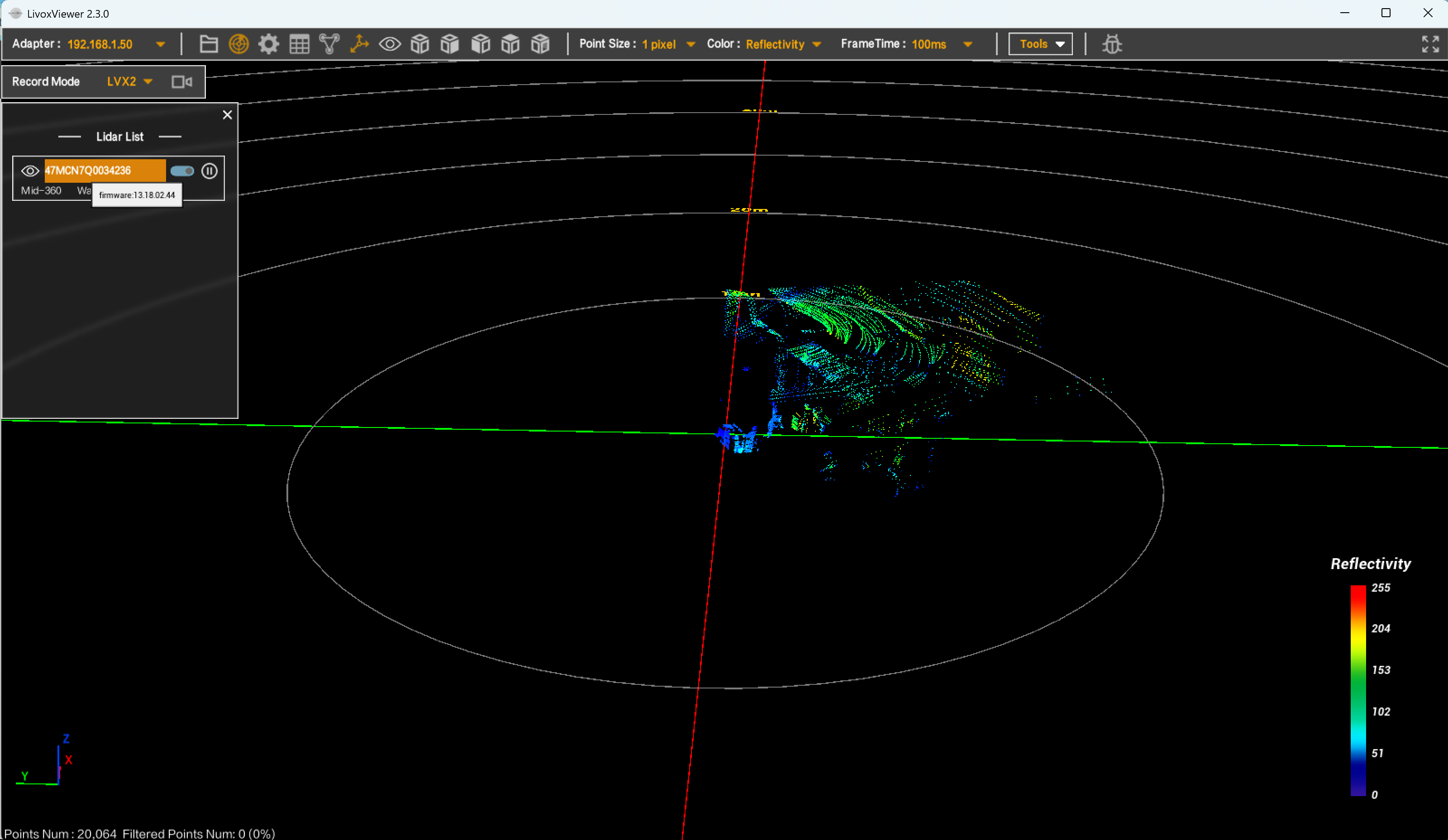
测试雷达没问题,但是固件版本13.18.02.40,官网最新固件13.18.02.44所以要更新固件
更新固件参考教程:https://www.hekongtek.com/help-item-222.html
第一次使用ubuntu时使用软件livox viewer2更新固件时一直崩溃报错,遂采用windows11安装livox viewer2软件进行更新固件,更新成功。最新版本13.18.02.44
三,安装驱动
安装系统依赖 复制下面的命令粘贴运行: code Bash
sudo apt update
安装编译工具和 PCL 点云库(FAST_LIO必用)
sudo apt install cmake g++ pkg-config libpcl-dev git -y
安装 ROS 2 的编译工具
sudo apt install python3-colcon-common-extensions -y
安装 ROS 2 的 PCL 转换库
sudo apt install libpcl-dev ros-jazzy-pcl-conversions ros-jazzy-pcl-ros -y